 |
|

5.2. Hard disks
This subsection introduces terminology related to hard disks. If you already know the terms and concepts, you can skip this subsection.
See Figure 5-1 for a schematic picture of the important parts in a hard disk. A hard disk consists of one or more circular aluminum platters\ , of which either or both surfaces are coated with a magnetic substance used for recording the data. For each surface, there is a read-write head that examines or alters the recorded data. The platters rotate on a common axis; typical rotation speed is 5400 or 7200 rotations per minute, although high-performance hard disks have higher speeds and older disks may have lower speeds. The heads move along the radius of the platters; this movement combined with the rotation of the platters allows the head to access all parts of the surfaces.
The processor (CPU) and the actual disk communicate through a disk controller . This relieves the rest of the computer from knowing how to use the drive, since the controllers for different types of disks can be made to use the same interface towards the rest of the computer. Therefore, the computer can say just ``hey disk, give me what I want'', instead of a long and complex series of electric signals to move the head to the proper location and waiting for the correct position to come under the head and doing all the other unpleasant stuff necessary. (In reality, the interface to the controller is still complex, but much less so than it would otherwise be.) The controller may also do other things, such as caching, or automatic bad sector replacement.
The above is usually all one needs to understand about the hardware. There are also other things, such as the motor that rotates the platters and moves the heads, and the electronics that control the operation of the mechanical parts, but they are mostly not relevant for understanding the working principles of a hard disk.
The surfaces are usually divided into concentric rings, called tracks, and these in turn are divided into sectors. This division is used to specify locations on the hard disk and to allocate disk space to files. To find a given place on the hard disk, one might say ``surface 3, track 5, sector 7''. Usually the number of sectors is the same for all tracks, but some hard disks put more sectors in outer tracks (all sectors are of the same physical size, so more of them fit in the longer outer tracks). Typically, a sector will hold 512 bytes of data. The disk itself can't handle smaller amounts of data than one sector.
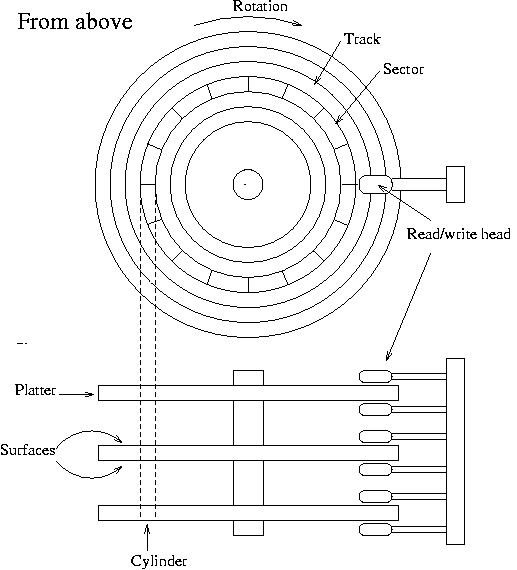
Each surface is divided into tracks (and sectors) in the same way. This means that when the head for one surface is on a track, the heads for the other surfaces are also on the corresponding tracks. All the corresponding tracks taken together are called a cylinder. It takes time to move the heads from one track (cylinder) to another, so by placing the data that is often accessed together (say, a file) so that it is within one cylinder, it is not necessary to move the heads to read all of it. This improves performance. It is not always possible to place files like this; files that are stored in several places on the disk are called fragmented.
The number of surfaces (or heads, which is the same thing), cylinders, and sectors vary a lot; the specification of the number of each is called the geometry of a hard disk. The geometry is usually stored in a special, battery-powered memory location called the CMOS RAM , from where the operating system can fetch it during bootup or driver initialization.
Unfortunately, the BIOS has a design limitation, which makes it impossible to specify a track number that is larger than 1024 in the CMOS RAM, which is too little for a large hard disk. To overcome this, the hard disk controller lies about the geometry, and translates the addresses given by the computer into something that fits reality. For example, a hard disk might have 8 heads, 2048 tracks, and 35 sectors per track. Its controller could lie to the computer and claim that it has 16 heads, 1024 tracks, and 35 sectors per track, thus not exceeding the limit on tracks, and translates the address that the computer gives it by halving the head number, and doubling the track number. The mathematics can be more complicated in reality, because the numbers are not as nice as here (but again, the details are not relevant for understanding the principle). This translation distorts the operating system's view of how the disk is organized, thus making it impractical to use the all-data-on-one-cylinder trick to boost performance.
The translation is only a problem for IDE disks. SCSI disks use a sequential sector number (i.e., the controller translates a sequential sector number to a head, cylinder, and sector triplet), and a completely different method for the CPU to talk with the controller, so they are insulated from the problem. Note, however, that the computer might not know the real geometry of an SCSI disk either.
Since Linux often will not know the real geometry of a disk, its filesystems don't even try to keep files within a single cylinder. Instead, it tries to assign sequentially numbered sectors to files, which almost always gives similar performance. The issue is further complicated by on-controller caches, and automatic prefetches done by the controller.
Each hard disk is represented by a separate device file. There can (usually) be only two or four IDE hard disks. These are known as /dev/hda, /dev/hdb, /dev/hdc, and /dev/hdd, respectively. SCSI hard disks are known as /dev/sda, /dev/sdb, and so on. Similar naming conventions exist for other hard disk types; see Chapter 4 for more information. Note that the device files for the hard disks give access to the entire disk, with no regard to partitions (which will be discussed below), and it's easy to mess up the partitions or the data in them if you aren't careful. The disks' device files are usually used only to get access to the master boot record (which will also be discussed below).
Hosting by: Hurra Communications Ltd.
Generated: 2007-01-26 17:57:30